
چشم انداز ماشین های خودران شاید هنوز هم که هنوز است به شکلی غیرممکن آینده نگرانه باشد.مسیر انقلابی ساخت این خودروها از زمان لئوناردو داوینچی آغاز شده و به سمت آینده ای می رود که در آن، انسان دیگر دست های خود را روی فرمان نخواهد گذاشت.
شرکت هایی نظیر فورد، مرسدس و تسلا حالا در رقابتی جدی با هم به سر می برند و هر کدام تلاش دارند ماشین های خودرانشان را به دنیای متغیر محصولات تجاری و مصرفی عرضه نمایند.
برای مثال، فورد اخیرا سرمایه گذاری هایش را در حوزه ماشین های خودران سه برابر کرده و مشغول تست30 خودروی بدون راننده هیبریدی از گروه فیوژن در کالیفرنیا، میشیگان و آریزوناست.

در ادامه این مطلب قصد داریم نگاهی به تاریخچه فناوری ماشین های خودران داشته باشیم وابداعات مهمی را از نظر بگذرانیم که در این میانه به دست آمد و مبنای خودروهای آینده را ساختند.
سبد خودران داوینچی
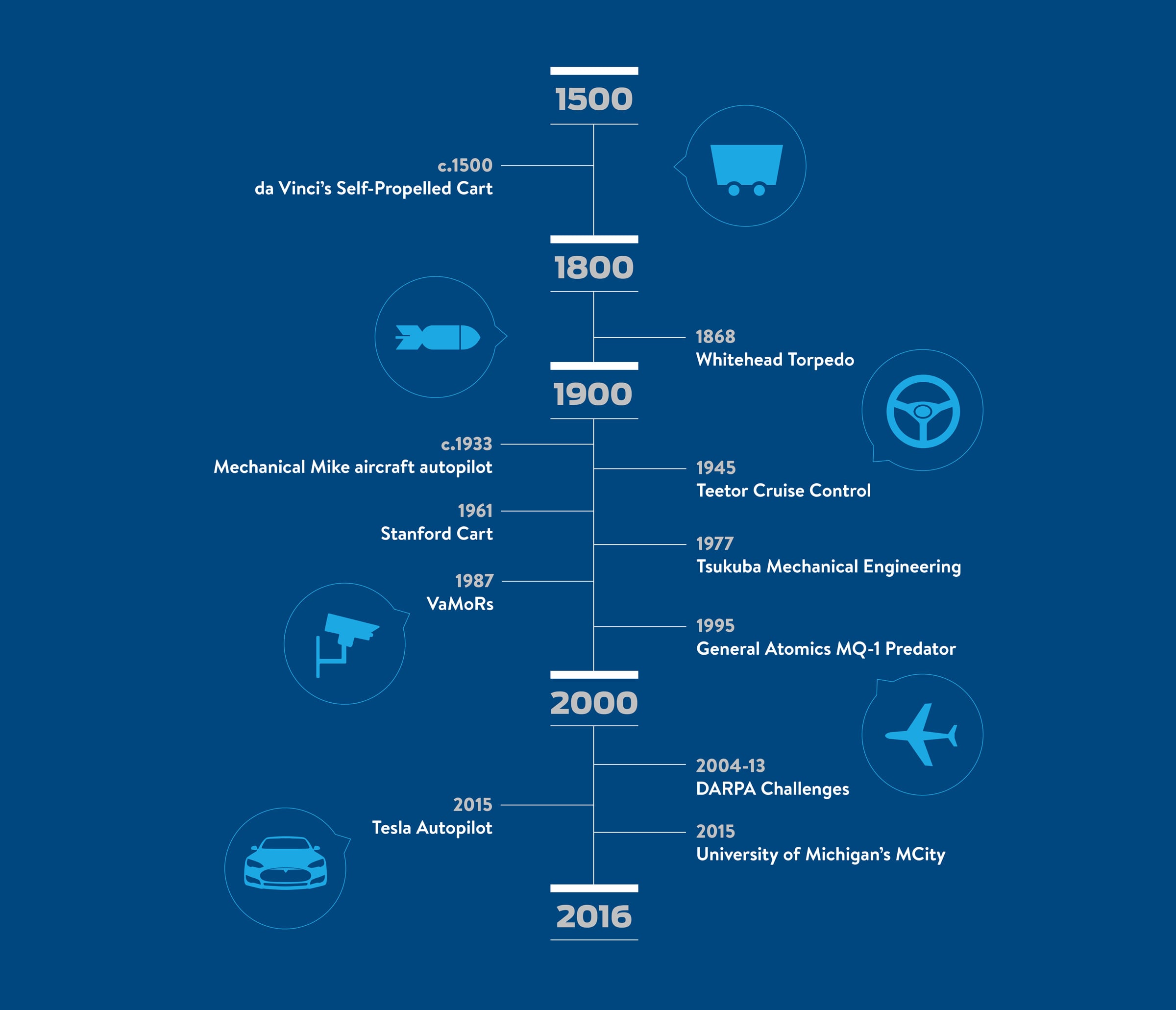
قرن ها قبل از ابداع ماشین، لئوناردو داوینچی سبدی را طراحی کرد که بدون نیاز به هل دادن حرکت می کرد. در واقع فنرهایی که به شدت فشرده شده بودند، نیروی مورد نیاز برای حرکت این سبد یا چرخ را فراهم می کردند و علاوه بر این، می شد از قبل، فرمان آن را هم تنظیم نمود تا یک مسیر از پیش تعیین شده را طی نماید.
این چرخ پیش قراول ماشین ها محسوب می شود و گاهی اوقات به عنوان نخستین ربات دنیا نیز از آن یاد می گردد.
اژدر وایت هِد- 1868 میلادی
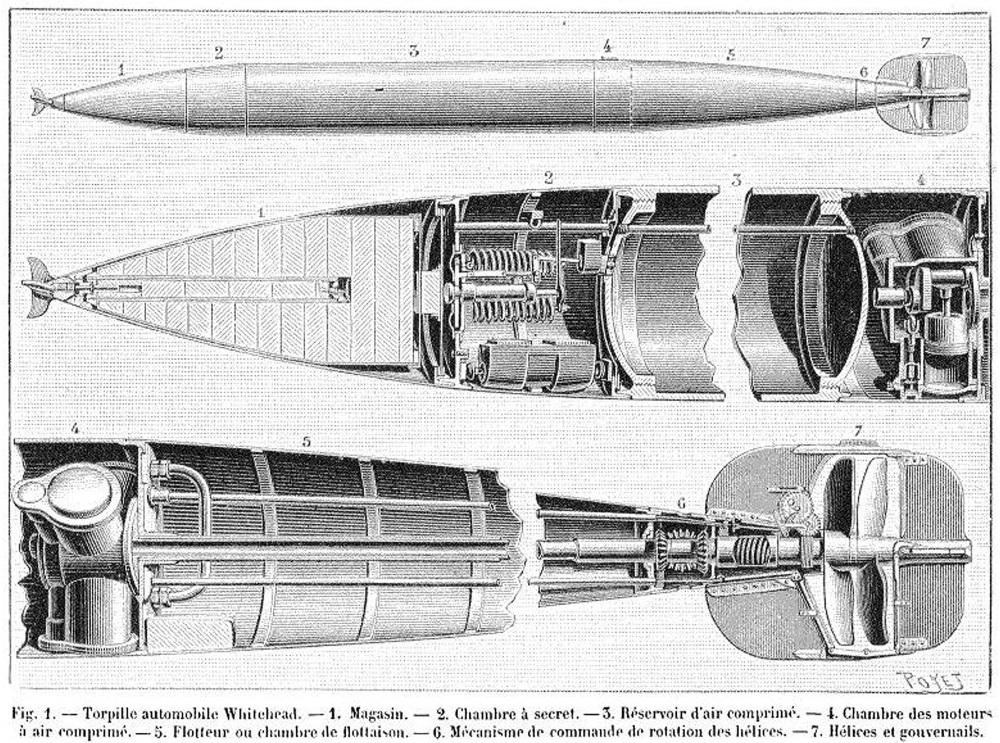
اینگونه تسلیحات جنگی عمدتا به میانه های دهه 1700 میلادی باز می گردند، با این همه، اختراع اژدر خودران زیرآبی توسط فردی به نام رابرت وایت هد را می توان به نقطه عطفی در تاریخ جنگ های دریایی تشبیه نمود.
آن اژدربه خاطر بهره مندی از نوعی سیستم فشرده به نام The Secret قادر بود چندین کیلومتر را در زیر آب حرکت کرده و همزمان عمق خود را هم حفظ نماید. از آن زمان به بعد، سیستم هدایت اژدر یاد شده پیشرفت های قابل توجهی را به خود دید و به ساخت طیف وسیعی از تسلیحات، هواپیماها و دیگر وسایل خودکار انجامید.
سیستم اتوپایلوت مکانیکی مایک- 1933 میلادی
با طولانی تر شدن سفرهای هوایی، نیاز به توسعه سیستم های اتوپایلوت برای هواپیماهای دوربرد نیز بیش از هر زمان دیگری افزایش یافت. مایک مکانیکی نمونه اولیه ای از یک سیستم اتوپایلوت بود که توسط شرکتی به نامSperry Gyroscope طراحی شد و در جریان یک سفر دور دنیا در سال 1933 میلادی توسط خلبانی به نامWiley Post مورد استفاده قرار گرفت.
نحوه عملکرد آن سیستم هم به این شکل بود که ژیروسکوپ ها مسیر هواپیما را دنبال می کردند و برای اطمینان از درستی مسیر، در عملکرد کنترلرهای آن مداخله می کردند. امروزه، ژیروسکوپ ها بخشی جدایی نشدنی از تکنولوژی وسایل نقلیه به شمار می روند.
کروز کنترل Teetor- سال 1945 میلادی
در زمان های قدیمی، مهندسی همراه با وکیل خود در حالی که سوار وسیله نقلیه اش بود به سمت مقصدی در حرکت بود. تکان های شدیدی که در حین سفر به ماشین وارد می شد و او را به حرکت در می آورد آنقدر زیاد بود که مهندس را به طراحی یکی از نخستین سیستم های کروز کنترل دنیا تشویق نمود.
آن سیستم در برگیرنده نوعی دریچه مکانیکی بود که می توانست سرعت وسیله نقلیه را تنظیم نماید و در سال 1958 میلادی نیز به صورت تجاری در آمد.
سبد استنفورد- 1961 میلادی

با بالا گرفتن رقابت های فضایی، محققان کشورهای مختلف دست به توسعه کاوشگرهایی زدند که قابلیت فرود روی ماه را داشته باشند. ایده ساخت کاوشگر ماه با قابلیت کنترل از راه دور توسط جیمز آدامز یکی از مهندسان دانشگاه استنفورد مطرح شد.
اما با در نظر داشتن تاخیر زمانی 2.5 ثانیه ای، از ارائه یک فرمان روی زمین تا اجرای آن روی سطح ماه، این سوال مطرح می شود که کنترل از راه دور چنین دستگاهی چطور میسر بود؟ پاسخ این سوال در نهایت به توسعه نخستین وسیله نقلیه چرخدار و خودران انجامید.
آن وسیله که کارت خوانده می شود عاقبت به تعدادی دوربین مجهز و از پیش برنامه ریزی شد تا بتواند یک خط سفید رنگ را تشخیص داده و به صورت خودکار آن را دنبال نماید. امروز تکنولوژی های جایگزین ارائه شده برای این فناوری جزء جدایی ناپذیر ماشین های خودران به شمار می روند.
شرکت مهندسی مکانیک Tsukuba-سال 1977 میلادی
این تکنولوژی که همچون کارت طراحی شده توسط یکی از مهندسان دانشگاه استنفورد ابتکاری و نوین محسوب می شد به ظاهر، بیشتر برای استفاده در منازل مناسب بود تا هر جای دیگری.
یک شرکت فعال در زمینه مهندسی مکانیک به نام Tsukuba که دفتر اصلی اش هم در ژاپن قرار داشت درواقع نوعی وسیله نقلیه مسافربری خودکار را طراحی کرده بود که می توانست به لطف دو دوربینی که روی بدنه اش تعبیه شده بودند، علامت های موجود در سطح خیابان ها را تشخیص دهد و در عین حال با سرعت حدودی 32 کیلومتر بر ساعت نیز حرکت نماید.
VaMoRs-سال 1987 میلادی
گام مهم دیگر در جهت پیشرفت تکنولوژی ماشین های خودرانتوسط یک مهندس آلمانی به نام ارنست دیکمنز برداشته شد که یک سدان را به مجموعه ای از چندین دوربین و شصت ماژول میکروپردازنده مجهز نمود تا امکان تشخیص و شناسایی اشیاء موجود در سطح جاده را پیدا کند.
اما نوآوری کلیدی ارائه شده از سوی دیکمنز همان «دید پویا» بود که به سیستم تصویر برداری امکان می داد «نویز» فرعی را تشخیص داده و صرفا روی آبجکت های مربوطه تمرکز نماید. امروز این نوع تصویربرداری نقشی قابل توجه در توانایی تشخیص خطر و موقعیت ماشین های خودران ایفا می کند.
VaMoRs آنچنان موفق ظاهر شد که توانست با سرعت بالغ بر 100 کیلومتر بر ساعت اتوبان مشهور آلمان را در هم نوردد.
The General Atomics MQ-1 Predator- سال 1995 میلادی

در نظر بسیاری از ما، ماشین های خودران ابزاری برای تبدیل کردن انسان از راننده به مسافر هستند، با این همه، گروه دیگری از وسایل نقلیههم اکنون در دست طراحی قرار دارند که به صورت کاملا تنها سفر خواهند کرد و شاید پهپادها بهترین نمونه ازاین گروه محصولات باشند.
اما مهم ترین پهپاد ارائه شده تا به امروز نیزPredator متعلق به شرکت جنرال اتمیکس است؛ نوعی هواپیمای بدون سرنشین که برای مدت بیست سال و در جریان سفرهایی 14 ساعته بر فراز مهم ترین نقاط استراتژیک دنیا به پرواز در آمده است.
البته لازم است یادآور شویم که درون ها در گروه محصولات صرفا نظامی جای نمی گیرند و برای مثالPredator به فناوری هایی مجهز شد که بیشتر در خودروها دیده می شود؛ از این میان می توان به رادار اشاره کرد که امکان مشاهده محیط پیرامونی درون در میان ابرها و مه را فراهم می کند و یا دوربین های حرارتی که امکان سفر در شب را به آن می دهند.
چالش های دارپا- سال 2004 تا 2013
بازوی تحقیقاتی وزارت دفاع آمریکا موسوم به دارپا حمایت مالی مجموعه ای از چالش ها را بر عهد گرفته که به پیشبرد تکنولوژی های خودرن می انجامند. در سال 2004 میلادی، رقابتی با حمایت این مرکز برگزار شد کهماشین های شرکت کننده در آن باید حدود 240 کیلومتر از مسیرهای بیابانی را به صورت خودکار طی می کردند.
هیچ ماشینی البته نتوانست این مسیر را به اتمام برساند اما چالش هایی که در ادامه برای این منظور انجام گرفت با موفقیت های خوبی همراه بود. برای مثال در رقابتی که سال 2007 میلادی انجام شد، ماشین ها باید مسیری 100 کیلومتری را در یک محیط شبیه سازی شده شهری طی می کردند. در جریان آن رقابت چهار خودرو توانستند در محدوده زمانی شش ساعته به خط پایان برسند.
اتوپایلوت تسلا- سال 2015 میلادی
جالب ترین جنبه قابلیت اتوپایلوت تسلا در اواخر سال 2015 میلادی معرفی شد؛ به موجب آن به روز رسانی که در قالب یک آپدیت نرم افزاری ارائه گردید، کنترل بدون دست ماشین های مدل اس این خودروساز در بزرگراه ها و آزادراه ها فراهم شد.
MCity دانشگاه میشیگان- سال 2015 میلادی

مرکزMobility Transformation در دانشگاه میشیگان کهMCity خوانده می شد در سال 2015 میلادی به عنوان یک مرکز طراز اول جهانی برای تست تکنولوژی ماشین های خودران راه اندازی شد. فورد اولین خودروسازی بود که ماشین های خودران خود را در این مرکز تست کرد و آن را از شدیدترین شرایط محیطی گذراند.
شاید جالب ترین قسمت در تاریخ ماشین های خودران همکاری بخش های خصوصی، دولت و مراجع دانشگاهی باشد که پیشتر هم شروع شده و قرار است به تولید اتومبیل های تمام خودران بیانجامد.
آنطور کهAndrew Ng کارشناس هوش مصنوعی گفته: ساخت ماشین های خودران امریاست که تنها توسط یک سازمان محقق نمی شود و مستلزم همکاری بخش های خصوصی و دولتی و البته اجتماعی از قانونگذاران، محققان، شرکت های فعال در صنعت تکنولوژی و همچنین تولید کنندگان اتومبیل است. او در ادامه پیش بینی کرده که «ماشین های خودران زودتر از زمانی که تصور می شود به سطح خیابان ها می آیند.»
مطالب مرتبط :
-
 ایلان ماسک: ماشین های خودران تسلا خطر بروز سوانح رانندگی را تا 50 درصد پایین می آورند
ایلان ماسک: ماشین های خودران تسلا خطر بروز سوانح رانندگی را تا 50 درصد پایین می آورند
-
 از هک آیفون تا تلاش برای غلبه بر ایلان ماسک؛ «جورج هاتز» با استارتاپ خود به نبرد بزرگان تکنولوژی می رود
از هک آیفون تا تلاش برای غلبه بر ایلان ماسک؛ «جورج هاتز» با استارتاپ خود به نبرد بزرگان تکنولوژی می رود
-
 خودروی لوکس بدون راننده BMW در سال ۲۰۲۱ متولد خواهد شد
خودروی لوکس بدون راننده BMW در سال ۲۰۲۱ متولد خواهد شد
-
 تا سال 2035 میلادی 21 میلیون ماشین خودران در خیابان های سرتاسر دنیا تردد خواهند کرد
تا سال 2035 میلادی 21 میلیون ماشین خودران در خیابان های سرتاسر دنیا تردد خواهند کرد